#5: Digital Controller Design
- karlalopezsanchez
- Feb 8, 2022
- 1 min read
The purpose of this project is to use controller design techniques to stabilie the two-mass-spring-damper benchmark problem and accuratel control the position of mass 2. This is done using the techniques learned in this class and implementing them using Matlab, Sisotool, and Simulink. After designing a controller that meets the specifications given, an impulse disturbance is applied to the sstem and then robust performance is found.

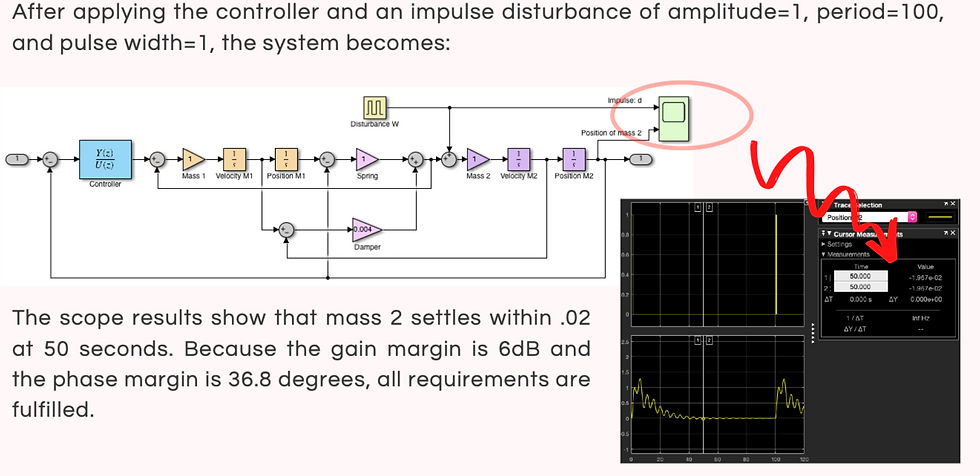
Requirements: Gain Margin: at least 6dB Phase margin: at least 30 degreek Mass 2 position must be within <0.02 within 5s.
Challenges: Using non-collocated control makes the sstem more challenging in terms of stabiliing the closed loop response. This can be seen from the pole-ero maps of the collocated vs non-collocated cases. For collocated control, the effect of the poorl damped poles can be reduced b the eros that are nearb. On the other had, in non-collocated control there are no comple conjugate eros that cancel the poorl damped poles. This creates instabilit hen closing the feedback loop. Another challenge comes from the vibrations caused b the spring hich result in a more challenging stabiliation hen tring to accuratel control the position of mass 2. This leads to performance limitation and stabilit issues.
Controller Design Approach:
Design:



Comments